
Un po’ più di due anni fa, in un post intitolato un po’ melodrammaticamente Abbiamo bisogno di macchine assassine, avevamo segnalato un’interessante iniziativa del MIT, ossia un sondaggio su Internet (chiamato Moral Machine) su quale comportamento dovrebbe tenere un’auto a guida autonoma nel caso in cui un incidente con danni alle persone fosse inevitabile: proteggere la vita dei passeggeri, o dei terzi (ad esempio pedoni)? Tener conto del numero delle possibili vittime, della loro età, del loro sesso? Salvare un bambino mettendo a rischio un anziano?
Probabilmente, la prima risposta che verrebbe naturale sarebbe dire che un robot (perché un’auto a guida autonoma è un particolare tipo di robot) non dovrebbe poter prendere decisioni sulla vita e la morte di persone. Eppure in realtà (e questo era il motivo del titolo del nostro vecchio post) se vogliamo che i robot siano utili nella vita di tutti i giorni è inevitabile che possano trovarsi di fronte a dilemmi come questo. Un’auto-robot sarà molto probabilmente di gran lunga più sicura di un guidatore umano, ma ci saranno sempre incidenti, nei quali la maggiore velocità di reazione di un pilota automatico può magari consentire di compiere una manovra d’emergenza per scegliere il danno minore… ma qual è il danno minore?
Ovviamente, per stabilirlo occorre un qualche criterio che, trattandosi dell’incolumità delle persone, dobbiamo inevitabilmente considerare etico, parte del complesso tema dell’etica robotica, o AI Ethics per usare il termine corrente in inglese, che è ormai ineludibile, visti i compiti sempre più complessi svolti (sempre meglio) dai software di intelligenza artificiale. Mentre per alcuni di questi compiti noi esseri umani abbiamo delle regole etiche più o meno formalizzate (pensiamo ad esempio all’ambito medico), lo stesso non vale in situazioni meno strutturate, come la guida di un autoveicolo. Certo, esiste il codice della strada, che ha lo scopo di ridurre il numero degli incidenti e identificarne la responsabilità quando si verifichino; ma se un incidente si verifica, che sia o meno per nostra colpa, difficilmente sapremmo ricostruire i motivi dei gesti che abbiamo compiuto una volta capito che l’incidente era inevitabile, gesti che probabilmente definiremmo, poco verosimilmente, istintivi. Un computer però non può invocare l’istinto come giustificazione, e quindi si ripropone il problema strettamente etico: se, ad esempio, i freni della mia auto si guastano mentre sto avvicinandomi a un passaggio pedonale, sono eticamente tenuto ad andare fuori strada rischiando la vita mia e dei passeggeri della mia auto pur di evitare di investire i pedoni che stanno attraversando? E un’auto autonoma quale scelta dovrebbe fare? O dovrebbe evitare di scegliere, e lasciare che gli eventi si svolgano “per inerzia”?
Il sondaggio del MIT poneva quesiti di questo tipo, e ora sulla rivista Nature ne sono stati pubblicati i risultati, che sono piuttosto interessanti.
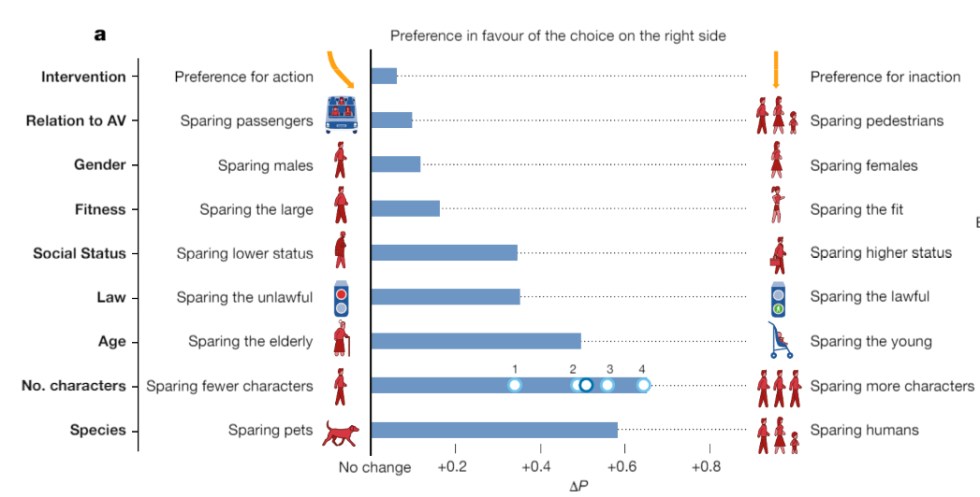
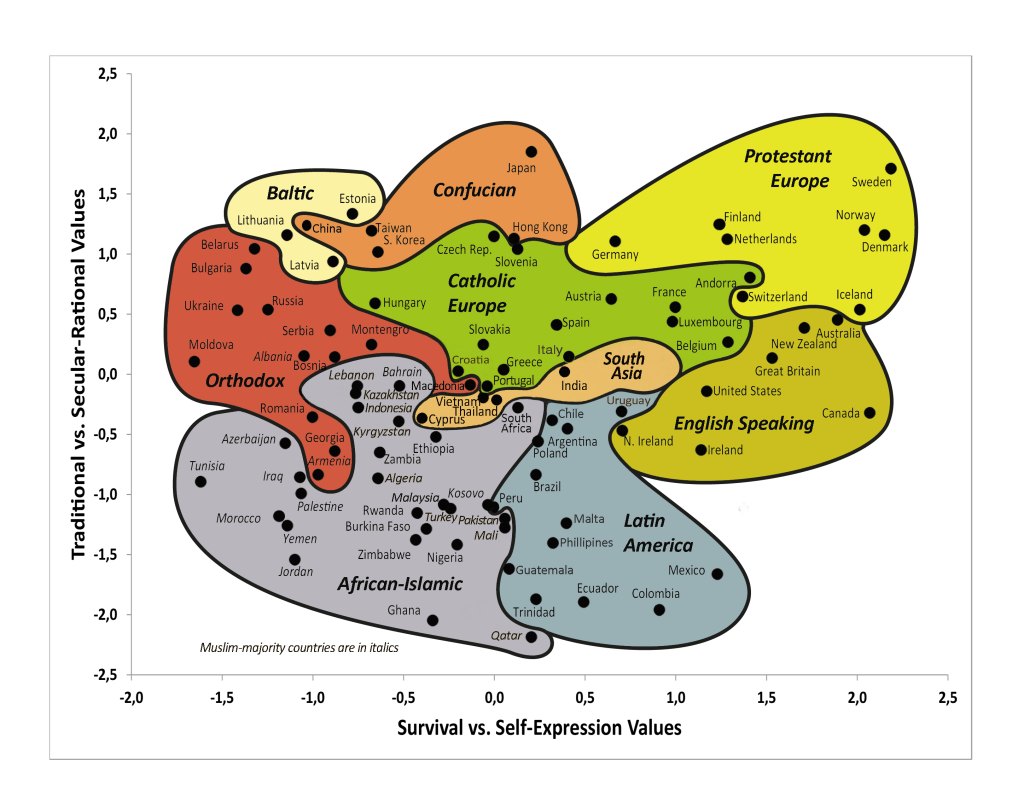
Si vede infatti che, se esiste una certa regolarità nei risultati (ad esempio nella direzione di ridurre il numero delle vittime, o di privilegiare i giovani rispetto agli anziani e, molto ingiustamente ;-), le persone in forma rispetto ai grassoni e le donne rispetto agli uomini), pure è rilevabile una notevole variabilità culturale dei risultati stessi, ossia in realtà dei presupposti etici condivisi dalle persone che hanno risposto. Gli autori hanno riscontrato che questa variabilità è fortemente correlata al paese di appartenenza degli “intervistati”, e in particolare all’appartenenza a uno di tre grandi cluster, raggruppamenti, di paesi: Ovest, Est e Sud (per la definizione precisa di questi raggruppamenti vi rinvio all’articolo). Nella figura qui sotto vedete quanto in ciascuno dei tre cluster siano forti le preferenze condivise di cui parlavo:
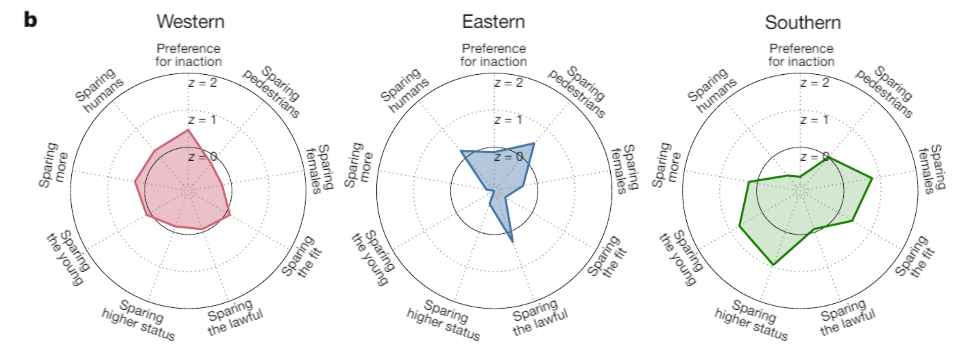
Come si vede, le differenze sono significative. Nell’ “Est”, è minima la preferenza per favorire i giovani rispetto agli anziani, che invece è massima al “Sud”, mentre a “Ovest” è più diffusa l’opinione per cui l’AI dovrebbe astenersi da ogni intervento attivo per orientare in un senso o nell’altro l’esito dell’incidente.
Conclusioni? Molte, e complesse. Premesso che il risultato di un sondaggio come questo è ovviamente “non scientifico”, il numero molto elevato di risposte rende comunque rilevanti i dati raccolti, e l’evidenza, peraltro intuitivamente credibile, che di fronte a una scelta etica la cultura prevalente in un paese faccia un’importante differenza. Questo comporta a mio avviso la necessità di una profonda riflessione su come l’etica debba essere “incorporata” nei sistemi intelligenti: dobbiamo esigere che in Italia un’automobile a guida autonoma si comporti in modo diverso che in Cina? Oppure dobbiamo cercare un comune denominatore valido per tutti? O, ancora, dobbiamo forse rivedere i nostri stessi pregiudizi etici per …somigliare di più ai robot? Anche in questo caso, infatti, come in altri che abbiamo già esaminato, esiste il serio rischio che gli algoritmi anziché essere neutri incorporino i pregiudizi, al limite anche razzisti, di chi li “istruisce”. Magari anziché trasmettere ai robot le nostre discriminazioni potremmo cercare di riconoscerle e liberarcene, no?
Immagine di apertura: la mappa culturale di Inglehart–Welzel, da cui derivano i cluster adottati nello studio citato
